G-sensor(Gravity sensor),重力传感器,又名加速度传感器(accelerometer),是能感知加速度大小的MEMS传感器。
工作原理
如图中的模型, 一个质量块两端通过弹簧进行固定。在没有加速度的情况下,弹簧不会发生形变,质量块静止。当产生加速度时,弹簧发生形变,质量块的位置会发生变化。 弹簧的形变量随着加速度的增大而增大。在弹簧的劲度系统 k 和质量块的质量 m已知的情况下,只要测量出弹簧的形变量,就可以求出系统的加速度。
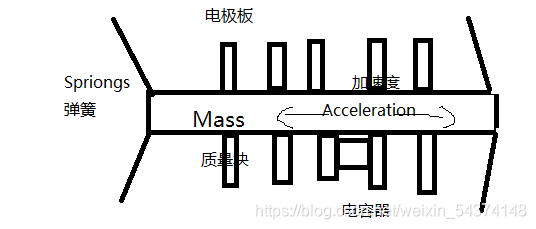
G-sensor内部有 finger sets, 用来测量产生加速度读时质量块的位移。 每一个finger set 相当两个电容极板, 当有加速度时质量块会产生相对运动,而位移的变化会导致差分电容的变化。
具体的差分电容检测和计算加速度过程由G-sensor内部完成,我们只需要直接读取其转化后的值即可。G-sensor输出值也不是直接的加速度值,它的计量单位是通常用g表示,1g代表一个重力加速度,即9.8m/s^2。1g=1000mg。
这里用一个例子再次强调一下G-sensor的输出值是根据其内部质量块的位移计算得出的:
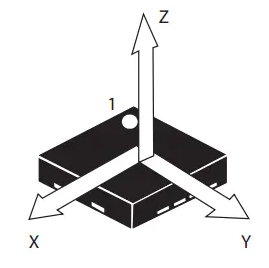
将G-sensor的Z轴垂直向地,静止放置在水平桌面上,此时G-sensor芯片是静止的,虽然芯片整体加速度为0g,但是读取其输出值,X/Y轴输出为0g,Z轴输出为1g。因为内部质量块在重力加速度的作用下,产生了位移。
G-sensor重要参数
测量范围 Measurement Rang
测量范围是传感器可以支持的输出加速度范围,通常用±g 表示。这就是G-sensor可以测量并准确输出的最大加速度。例如,一个测量范围是±8g G-sensor,它的输出一直到加速度达到±8g 时是线性的。
灵敏度 Sensitivity
灵敏度表示传感器输出随加速度(输入)变化的比例,它定义理想情况下加速度和传感器输出的直线关系。数字输出的传感器的灵敏度通常使用 LSB/g 或mg/LSB 表示。例如,一个灵敏度为4mg/LSB的G-sensor,若其Z轴输出为100,则可计算出Z轴加速度为400mg。
0g偏移 0g-offset
0g 偏移置表示在没有加速度(零输入)时输出的测量值。模拟输出的传感器通常使用伏特或毫伏表示,数字输出的传感器使用码字表示。
不同型号的G-sensor的 0g-offset 不同,同一型号的不同芯片的 0g-offset 也不同,甚至同一颗芯片中不同轴的 0g-offset 也不同,是否需要校正要视具体应用而定。如果应用中只关心加速度的相对变化,而不关心加速度的具体数值,则不需要校正。如果是关心加速度的具体数值,而所选器件的 0g-offset 又比较大,则必须要校正。
某些G-sensor本身有 offset 寄存器,这是只需要把待校准的轴沿水平方向静止放置,测量其 0g 时的输出,并把这个值乘以-1 写入 offset 寄存器即可。如果G-sensor本身没有 offset 寄存器,则需要用户在自己的处理器中记录这个数值,并在实际的测量结果中减去这个 offset。
输出速率 ODR
*ODR(Output Data Rate),表示G-sensor的输出数据的刷新频率。*ODR越高,输出数据更新越快,功耗越高。G-sensor的ODR往往都是可以配置的。
工作模式
陀螺仪传感器的原理
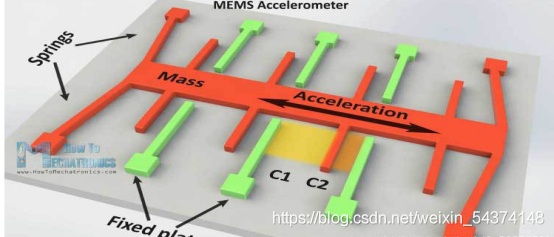
首先了解一下MEMS加速度计的原理,简图如下图所示,其中质量块mass被弹簧springs支撑,使得其只能沿着预定方向位移,从而检测特定方向的加速度;绿的部分是固定的电极板Fixed plates。检测原理是当质量块感受到加速度时,会在相应方向产生位移,从而使得固定电极板构成的两个平行板电容器C1,C2的电容大小发生改变,检测其电容值大小即可换算成相应的加速度
**陀螺仪工作原理简介:**MEMS陀螺仪的检测原理与MEMS加速度计类似,它基于科里奥利效应(Coriolis Effect)所产生的科里奥利力(Coriolis Force)而设计的。
如下图所示,MEMS陀螺仪的核心是一个微加工机械单元,其讯号调节电路可以分为马达驱动和加速度计感测电路两个部分。其中,马达驱动部分是透过静电引动方法,产生一个音叉机制共振运动,为机械元件提供激励;科里奥利力把角速率转换成一个特定感测结构的位移,通过位移产生电容变化,感测部分透过测量电容变化来测量科氏力在感测质量上产生的位移。因为位移大小与所施加的角速率大小成正比,以此可以获得角速度和角加速度量
————————————————
版权声明:本文为CSDN博主「学习ing5577」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/weixin_54374148/article/details/119649958